|
 Home / Ultimas Noticias
Home / Ultimas Noticias
Archivo Noticias de la Ciencia y la
Tecnología.
Archivo Noticias del Espacio
Contacto
Suscripciones (email)
Boletín Noticias de la Ciencia y la
Tecnología
Boletín Noticias del Espacio
Boletín Noticias de la Ciencia y la
Tecnología Plus
|
Recuerda:
suscríbete a nuestros boletines gratuitos y recibe cómoda y
semanalmente las noticias en tu dirección electrónica.
Ciencia
Espacial
El Gran Pájaro Hacia Marte
29
de Agosto de 2005.
 La
NASA sigue con el periódico envío de nuevos vehículos de exploración
hacia nuestro vecino planetario, Marte. En esta ocasión, la agencia
estadounidense ha colocado en ruta hacia su objetivo a su misión más
ambiciosa desde el punto de vista de la observación de su superficie. El
MRO transporta la mayor cámara enviada jamás hacia el Planeta Rojo. La
NASA sigue con el periódico envío de nuevos vehículos de exploración
hacia nuestro vecino planetario, Marte. En esta ocasión, la agencia
estadounidense ha colocado en ruta hacia su objetivo a su misión más
ambiciosa desde el punto de vista de la observación de su superficie. El
MRO transporta la mayor cámara enviada jamás hacia el Planeta Rojo.
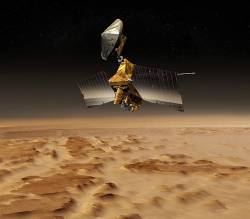
Debido a la masa de esta cámara especial, el MRO (Mars Reconnaissance
Orbiter, u Orbitador de Reconocimiento de Marte) pesa el doble que otros
vehículos recientemente lanzados hacia él. Se trata básicamente de un
auténtico satélite espía cuyos 2.180 kg al despegue denotan el diámetro
(0,5 metros) del telescopio que empleará para escrutar el suelo
marciano. El resultado, si todo va bien, será la obtención de las
imágenes de mayor resolución de la superficie, lo bastante claras como
para poner de manifiesto detalles hasta ahora desconocidos, y quizá
suficientes para descubrir el paradero de misiones perdidas, como la
Beagle-2 o la Mars Polar Lander. La potencia de su cámara principal
HiRISE nos enseñará la geología y las estructuras que adornan el paisaje
situado bajo ella, permitiendo identificar los obstáculos que podrían
perjudicar a las nuevas misiones robóticas en la superficie. Una segunda
cámara de más ancho campo pondrá cada observación en su contexto. Las
fotografías, lógicamente, transportarán más información de lo habitual,
de modo que los ingenieros han preparado un sistema de comunicaciones
más rápido y una antena de alta ganancia de 3 metros que lo haga viable.
El vehículo, además, intentará buscar agua en el subsuelo del planeta, y
nos ayudará a encontrar zonas de aterrizaje interesantes para las
próximas misiones de exploración. Otros instrumentos se ocuparán de
identificar los minerales del suelo y de estudiar cómo el polvo y el
vapor de agua son transportados en la atmósfera.
Los objetivos del MRO, en efecto, siguen siendo la búsqueda de agua y el
estudio de la historia de este elemento en Marte. Ahora que sabemos que
hubo agua líquida en la superficie, queremos averiguar si ésta
permaneció durante mucho tiempo en ese estado, condición necesaria para
dar validez a las teorías de que pudo existir un hábitat apto para la
vida. Al mismo tiempo, las imágenes de la sonda intentarán mostrarnos
antiguas líneas de costa, zonas de sedimento depositado en cuencas de
cuerpos de agua que se evaporaron, etc.
La Mars Odyssey y la europea Mars Express han dejado claro que los polos
marcianos poseen hielo de agua. La MRO nos aclarará si dicho hielo es
una capa superficial que depende del ciclo del vapor de agua en la
atmósfera, o si pertenece a la zona superior de un depósito mucho más
profundo y abundante. El espectrómetro con el que está dotada también
podrá observar áreas cinco veces más pequeñas que un campo de fútbol,
una escala muy adecuada para identificar estructuras acuáticas de menor
tamaño que lagos o ríos (por ejemplo, surtidores de agua).
La presencia del MRO en órbita alrededor de Marte será igualmente
importante para otros aparatos que viajen hacia el planeta en el futuro.
Tras su misión científica principal, se convertirá en un auténtico
repetidor que comunicará a sus compañeros con la Tierra, como hacen en
la actualidad la Mars Odyssey o la Mars Global Surveyor. En cierto modo,
constituirá el primer componente de una “Internet interplanetaria”.
El lanzamiento se produjo a las 11:43 UTC del 12 de agosto, tras algunos
retrasos por dificultades técnicas. Un cohete Atlas-V (401, AV-007)
despegó con el MRO desde la rampa SLC41 de Cabo Cañaveral, en Florida.
El vector utilizó una etapa superior Centaur-II que actuó en dos
ocasiones. La primera (9 minutos y medio) lo hizo para alcanzar una
órbita de aparcamiento provisional, 14 minutos después del despegue.
Transcurridos unos 33 minutos de “costeo”, y una vez separado el
carenado protector de la sonda, la fase Centaur-II volvió a encenderse
(11:32 UTC, durante 10 minutos más) y la aceleró hasta la velocidad de
escape. El MRO se separó de su cohete a las 11:41 UTC. Unos 61 minutos
después del lanzamiento, la antena japonesa del Uchinoura Space Center
entraba por primera vez en contacto con el vehículo. Unos 14 minutos
después de la separación, los paneles solares finalizaban su despliegue
(proporcionarán 2 kilovatios en Marte), las baterías empezaban a
recargarse y la sonda entraba en la fase de comprobación de subsistemas.
El 13 de agosto, superaba la distancia de la Luna.
Entre agosto de 2005 y enero de 2006, la MRO permanecerá en la llamada
fase de crucero. Durante los primeros días de este período, los
controladores se asegurarán de que el vehículo permanezca estable y
seguro. Se realizarán comprobaciones del estado de los sistemas y
calibraciones que aseguren que todo funcionará bien durante la llegada a
Marte. Además, se efectuarán hasta tres correcciones de trayectoria para
lograr una aproximación conforme a lo planeado. La primera (la mayor) se
ha efectuado ya (27 de agosto), la segunda unos tres meses después, y la
tercera unos 40 días antes de la entrada en órbita marciana.
Entre enero y marzo de 2006, la MRO entrará en la fase de aproximación,
preparándose para la inserción orbital. Será el momento de realizar
mediciones de navegación que determinen la posición exacta y la
trayectoria de la sonda. En función de estos resultados se han previsto
hasta dos maniobras de corrección de trayectoria adicionales. Otorgarán
cambios de velocidad pequeños y se realizarán en los últimos días del
viaje, para asegurar el menor error posible (menos de 25 km) en la
llegada (a 300 km por encima de la superficie del planeta). De hecho, la
quinta maniobra sólo se realizará si es necesaria, 24 ó 12 horas antes
de la inserción orbital (10 de marzo). La MRO dispone de 1.196 kg de
hidracina para alimentar a sus seis motores principales MR-107E, que se
ocuparán de las maniobras.
Buena parte de la información necesaria para alcanzar tal precisión se
obtendrá de un experimento instalado a bordo. El MRO lleva una cámara
óptica de navegación que tomará fotografías de las lunas Fobos y Deimos
durante un período que va de 30 días antes de la llegada al planeta a 2
días antes. Comparando las posiciones de estos satélites respecto al
cielo estrellado con los cálculos realizados previamente podrá
determinarse la posición exacta de la sonda. Si el experimento sale
bien, será aplicado a futuras misiones, en particular aquellas que
necesitarán aterrizar en puntos muy concretos.
La MRO llegará a Marte moviéndose a unos 3 km/s. Para entrar en órbita
en marzo de 2006 deberá reducir esta velocidad en unos 1.000 m/s. Lo
logrará usando su sistema de propulsión durante 25 minutos. La maniobra
llevará a la sonda detrás del planeta, lo que ocasionará una pérdida
temporal del contacto. Éste se recuperará unos 30 minutos después.
Finalizada la maniobra de inserción orbital, el vehículo se encontrará
siguiendo una trayectoria muy elíptica alrededor de Marte (300 por
45.000 km, período: unas 35 horas). La órbita polar definitiva, circular
y más baja, se obtendrá como lo hizo la Mars Odyssey, es decir, mediante
la técnica del aerofrenado. Durante seis meses, hasta noviembre de 2006,
la sonda rozará la atmósfera marciana en la zona baja de su órbita,
reduciendo su velocidad y por tanto disminuyendo la altitud de su
apoastro (máxima distancia). El aerofrenado se realizará con mucho
cuidado y en tres fases, de 5, 500 y 64 órbitas, respectivamente. La
primera servirá para entrar en contacto con la atmósfera y calibrar su
densidad, la segunda para reducir el apoastro propiamente dicho, y la
tercera para volver a elevar al vehículo fuera de la atmósfera, hasta
los 450 km.
Antes de iniciar las observaciones científicas, el MRO ajustará su
órbita durante unas dos semanas, hasta los 255 por 320 km. Después,
entre el 7 de octubre y el 8 de noviembre de 2006, permanecerá a la
espera de la finalización de la conjunción solar que colocará al Sol
entre los dos planetas, impidiendo unas comunicaciones fluidas. Se
aprovechará este tiempo para chequear los instrumentos, activarlos y
configurarlos. Se realizarán también las primeras observaciones
preliminares de calibración.
Las operaciones científicas se prolongarán durante dos años, entre
noviembre de 2006 y noviembre de 2008 (fecha de la siguiente conjunción
solar). En esta fase se sucederá el día a día de la misión. A
continuación, y hasta el 21 de diciembre de 2010, el orbitador actuará
como repetidor de comunicaciones para las sondas que aterrizarán en el
planeta con posterioridad a su llegada a éste. El instrumento Electra
proporcionará la cobertura en UHF necesaria para que las sondas de
aterrizaje y los rovers puedan hablar con la Tierra de forma continuada.
Ya en 2011, debía ser reemplazado en estas funciones por otra sonda (el
Mars Telecommunications Orbiter), pero como ésta acaba de ser cancelada,
la NASA deberá continuar utilizando al MRO durante al menos otros 5
años, ya que lleva suficiente combustible para ello. La función de
repetidor podría compartirse con nuevas investigaciones científicas.
Las observaciones de los instrumentos de la sonda serán más complejas
que todo lo que hemos visto hasta ahora. El punto más próximo de su
órbita a la superficie quedará situado justo encima del polo sur
marciano. El más lejano, sobre el polo norte. La órbita,
heliosincrónica, permitirá observaciones de cualquier punto siempre a la
misma hora del día.
Para llevar a cabo sus operaciones, Lockheed Martin Space Systems, el
constructor, ha ideado el MRO utilizando un diseño básicamente nuevo.
Por ejemplo, el vehículo ha sido optimizado para la fase de aerofrenado,
que en otras misiones ponía en peligro los paneles solares de los
vehículos y por tanto su vida útil.
Como se ha dicho, la sonda posee una antena de alta ganancia y unos
grandes paneles solares que se abrieron poco después del despegue. En
Marte, durante la fase de aerofrenado, la nave ofrecerá una superficie
de 37,7 metros cuadrados (13,6 metros de envergadura), lo que facilitará
la fricción y la reducción de la velocidad. En el cuerpo principal del
vehículo, además de los sistemas habituales, se hallan instalados los
instrumentos científicos, a saber: High Resolution Imaging Science
Experiment (HiRISE), Context Camera (CTX), Mars Color Imager (MARCI),
Compact Reconnaissance Imaging Spectrometer for Mars (CRISM), Mars
Climate Sounder (MCS), y Shallow Radar (SHARAD). Además, utilizará tres
instrumentos de ingeniería: Electra UHF Communications and Navigation
Package, Optical Navigation Camera y Ka-band Telecommunications
Experiment Package. Dos últimos experimentos científicos podrán llevarse
a cabo utilizando datos de ingeniería (Gravity Field Investigation
Package y Atmospheric Structure Investigation Accelerometers).
La misión está coordinada por el Jet Propulsion Laboratory (JPL) de la
NASA. En el instrumental han participado el Applied Physics Laboratory
de la Johns Hopkins University, Malin Space Science Systems, la Univ. of
Arizona, Ball Aerospace & Technologies Corp., el MIT, el Goddard Space
Flight Center, la George Washington University, el NASA/Langley Research
Center, la Agenzia Spaziale Italiana (ASI), la Washington University,
Alenia Spazio, y la Univ. of Rome-INFOCOM. Según la agencia
estadounidense, el MRO ha costado unos 500 millones de dólares,
incluyendo el lanzamiento.
Más información en:
|

