|
 Home / Ultimas Noticias
Home / Ultimas Noticias
Archivo Noticias de la Ciencia y la
Tecnología.
Archivo Noticias del Espacio
Contacto
Suscripciones (email)
Boletín Noticias de la Ciencia y la
Tecnología
Boletín Noticias del Espacio
Boletín Noticias de la Ciencia y la
Tecnología Plus
|
Recuerda:
suscríbete a nuestros boletines gratuitos y recibe cómoda y
semanalmente las noticias en tu dirección electrónica.
Ciencia Espacial
Informe MER
19
de Septiembre de 2005.
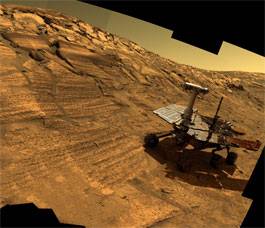 Los
dos robots móviles de la NASA que se hallan en la superficie de Marte
han superado su primer año marciano, un extraordinario éxito jamás
soñado por los impulsores del programa. Y las dos máquinas, a pesar de
pequeños e inevitables “achaques”, siguen dispuestas a continuar
trabajando durante mucho tiempo más. Los
dos robots móviles de la NASA que se hallan en la superficie de Marte
han superado su primer año marciano, un extraordinario éxito jamás
soñado por los impulsores del programa. Y las dos máquinas, a pesar de
pequeños e inevitables “achaques”, siguen dispuestas a continuar
trabajando durante mucho tiempo más.
El robot Opportunity se recobró rápidamente de unos de estos problemas
técnicos a mediados de septiembre. Tras una anomalía ocurrida en la
jornada 563 (Sol 563), que reinicializó sus sistemas, el vehículo dedicó
varios días a una continuada recuperación de sus capacidades de trabajo.
Después, reanudó su camino hacia la llamada “Erebus Highway”, aunque los
controladores adoptaron precauciones especiales para no dañarlo.
A partir de la jornada 580, el Opportunity reinició sus operaciones
normales. Avanzó mucho en dirección al cráter Erebus, y en especial
hacia la citada Erebus Highway, que es un área rica en afloramientos
rocosos que se extiende al sur y hacia el cráter. Fueron días de
desplazamientos no muy largos y teleobservaciones limitadas. Finalmente,
hacia el Sol 586, se empezaron a obtener imágenes del interior del
cráter, cada vez más cercano.
Poco antes de llegar al borde de la estructura geológica, el Opportunity
usó su brazo robótico para realizar observaciones de varias rocas, pero
entonces sufrió una reinicialización “en caliente” de los programas de
su ordenador de vuelo, tras lo cual el vehículo entró en modo seguro. En
Sol 597, a principios de octubre, se enviaron órdenes para averiguar el
estado del robot. Todo parecía estar bien y se recuperó el control con
rapidez. Al día siguiente, se probaron todos los subsistemas, sin que se
encontrase nada anómalo. Su hermano gemelo, el Spirit, había sufrido
reinicializaciones de este tipo en mayo y agosto de 2004, debido a un
fallo muy infrecuente en los programas, pero se decidió no corregirlo y
aceptar las breves interrupciones que ello implica.
De regreso a la actividad, el Opportunity continuó avanzando a lo largo
del borde del cráter Erebus, en dirección oeste. En Sol 601 recorrió 34
metros, y en Sol 603 se programaron 45 metros más, pero el vehículo
encontró un índice de deslizamiento del 44 por ciento después de los
primeros 5 metros, y se detuvo (el límite se halla en el 40 por ciento).
El próximo paso fue retroceder un poco para salir de la zona deslizante.
El 9 de octubre, en Sol 608, el Opportunity consiguió encontrar de nuevo
terreno adecuado para avanzar, y así lo hizo, siguiendo su ruta
alrededor del cráter. A mediados del mes, las maniobras continuaban
siendo de progreso con periódicas paradas para efectuar observaciones.
En Sol 628, tras una noche de “descanso”, el robot no “despertó”
automáticamente debido a que una tormenta de arena había disminuido los
niveles de luz, impidiendo iluminar adecuadamente la superficie de las
células solares. Los programas abortaron correctamente las actividades
para el día. Al día siguiente, los controladores enviaron las órdenes
para reanudarlas, y en Sol 630 el polvo de la atmósfera ya había
disminuido lo suficiente.
A principios de noviembre, con los niveles de energía disponible en la
cifra adecuada, el Opportunity volvió a la acción normal. En Sol 632, se
encontró en las cercanías de un afloramiento rocoso llamado “Olympia”,
que empezó a examinar con los instrumentos de su brazo robótico. La
herramienta de abrasión, por ejemplo, limpió el objetivo denominado
“Kalavrita”, que después fue analizado por la cámara microscópica y los
espectrómetros Mössbauer y de rayos-X. En Sol 636, volvió a utilizar el
espectrómetro infrarrojo, cuyo uso está limitado, dado que puede causar
reinicializaciones. Otros objetivos investigados fueron “Ziakas” y
Agrafa”.
El panel solar del Opportunity se limpió solo en Sol 638, elevando la
producción eléctrica hasta los 720 vatios/hora. Sus instrumentos
empezaron a prestar atención al objetivo “Antistasi”, un guijarro muy
basáltico. Otras áreas de interés fueron “Show Low”, “Sedona”, “Winslow”
y “Snowflake”, situadas en afloramientos cercanos.
El 20 de noviembre, en Sol 649, el Opportunity se desplazó hasta otro
afloramiento de apariencia atractiva y se preparó para desplegar su
brazo robótico. Sin embargo, un problema en uno de los motores que
permiten su desplazamiento, lo evitó. El motor afectado se encontraba en
la articulación del “hombro” del brazo.
Durante varias jornadas, los ingenieros trataron de recuperar
información sobre las causas de lo sucedido. Una de las posibilidades
barajadas era una posible degradación de la lubricación. El brazo ha
trabajado siete veces más tiempo de lo inicialmente programado. Se
realizaron varias pruebas de diagnosis, de las cuales se obtuvieron
resultados esperanzadores. Mientras tanto, el vehículo, aparcado junto
al cráter Erebus, se limitaba a realizar observaciones remotas de
objetivos tales como “Drake”, “Chino Valley”, “Bellemont”, “Camp Verde”,
“Young”, “Cherry” y “Paulden”.
El 8 de diciembre, se consiguió que el motor girara aplicando más
corriente de lo normal. Ello ayudó a certificar que el problema no
estaba en una obstrucción física o una lubricación degradada, sino en un
hilo roto en la bobina del motor eléctrico. Se hicieron varias pruebas
con voltajes diferentes.
Por fin, el 13 de diciembre (Sol 671), los controladores ordenaron el
despliegue del brazo robótico de su posición de descanso. El cambio de
voltaje solucionó el problema con el motor, aunque éste continuará
siendo vigilado. Los científicos están estudiando mantener el brazo
desplegado incluso cuando no se deba emplear, para asegurar que pueda
usarse cuando el motor dañado se vuelva definitivamente inestable.
Por su parte, el Spirit había continuado sin dificultades sus trabajos
en la cima de la colina Husband Hill, en el otro extremo del planeta.
Entre las jornadas 599 y 605, el robot utilizó su instrumental para
estudiar el objetivo llamado “Irvine”, observó los satélites Fobos y
Deimos, y ensayó la posibilidad de recibir órdenes a través del sistema
de radio de UHF de la sonda orbital Mars Odyssey. Hasta ahora, dicho
sistema se empleaba sólo para recibir la información procedente del
vehículo.
A mediados de septiembre, el Spirit utilizó sus cámaras para observar el
“Tennessee Valley”, además de analizar una zona del suelo llamada
“Cliffhanger”. En Sol 607, aplicó su cámara microscópica sobre este
último, además de dos de sus espectrómetros.
Los siguientes días los utilizó para desplazarse y alcanzar la verdadera
cima (“True Summit”), determinada por los análisis de la última
información obtenida por el robot, y situada sólo a unos pocos metros de
su posición actual. Además, cambió de lugar para conseguir un panorama
tridimensional de las planicies y valles situados al pie de la colina.
Por último, examinó un objetivo llamado “Hillary” en honor del famoso
montañero que alcanzó la cima del Monte Everest en 1953. Mucho más
modesto, el Spirit se encontraba a 106 metros por encima de su punto de
aterrizaje.
El robot pasaría varios días en la zona, así que capturó un panorama de
360 grados (Sol 620 a 622) y continuó observando objetivos de interés.
Por ejemplo, regresó al afloramiento rocoso “Hillary”, donde desplegó su
brazo robótico para trabajar, si bien existía la duda de si el vehículo
se hallaba totalmente estable. Un primer intento de aproximación a
Hillary acabó en efecto con una piedrecita colocándose bajo la rueda
frontal izquierda del Spirit. El robot lo detectó y desplazó
intermitentemente dicha rueda para aposentarse mejor. Los ingenieros no
quieren que un desplazamiento inesperado provoque un golpe en los
instrumentos del brazo robótico. Este último fue desplegado finalmente
en Sol 627.
Completado su trabajo en la cima de “Husband Hill” (15 de octubre), el
Spirit inició el descenso de la colina en dirección sur. Las imágenes
transmitidas mostraron un “camino” aparentemente seguro para la
maniobra. El robot avanzó casi cada día, con breves paradas cuando
surgía algún objetivo de interés. Este fue el caso de un afloramiento
llamado “Kansas”, donde se estudiaría el objetivo “Kestrel”.
Durante las jornadas 641 a 645, se efectuaron nuevas pruebas de envío de
comandos al Spirit mediante el sistema UHF de la sonda Mars Odyssey. En
Sol 644, sin embargo, hubo dificultades con la recepción y el vehículo
suspendió todas las actividades, situándose en modo automático, del cual
se recuperaría en Sol 646. Siguieron varias observaciones de “East
Basin”, durante una de las pocas oportunidades que quedaban antes de
perderla de vista.
En Sol 655, el Spirit recorrió más de 94 metros, totalizándose 126 entre
la jornada 655 y la 659. Ello le permitió avanzar mucho y quedar situado
para un trabajo coordinado con el telescopio espacial Hubble,
relacionado con la opacidad de la atmósfera y otras cuestiones, que
ayudarán a calibrar los resultados del gran telescopio durante sus
observaciones del planeta Marte.
Durante otra parada en el camino, el robot analizó el afloramiento
“Larry’s Bench”, y prestó atención a posibles estrellas fugaces en el
cielo nocturno. Marte estaba pasando por una zona de restos dejados por
el cometa Halley.
En Sol 680 (1 de diciembre), el Spirit se acercó a los objetivos
“Miami”, “Comanche”, “Algonquin”, “Pima” y “Yaqui”, además de
“Meentwioni” y “Myammia”. Se prestó atención especial al afloramiento
“Algonquin” y a una zona en él denominada “Iroquet”. Otros objetivos
fueron “Abiaka” y “Osceola”, del afloramiento “Seminole”. Actualmente,
sigue descendiendo por la colina Husband Hill, en dirección a otras
zonas interesantes.
Científicos e ingenieros continúan muy satisfechos por el comportamiento
de los dos robots gemelos, los cuales han conseguido explorar la
superficie del Planeta Rojo durante todo un año marciano (687 días
terrestres). El Opportunity inició su segundo año a mediados de
diciembre, y el Spirit lo logró incluso antes. Nada mal para unos
vehículos que debían funcionar sólo durante tres meses, y que se
adentran otra vez en el final del verano local.
Más información en:
|

