|
 Home / Ultimas Noticias
Home / Ultimas Noticias
Archivo Noticias de la Ciencia y la
Tecnología.
Archivo Noticias del Espacio
Contacto
Suscripciones (email)
Boletín Noticias de la Ciencia y la
Tecnología
Boletín Noticias del Espacio
Boletín Noticias de la Ciencia y la
Tecnología Plus
|
Recuerda:
suscríbete a nuestros boletines gratuitos y recibe cómoda y
semanalmente las noticias en tu dirección electrónica.
Exploración Espacial.
Y Ahora, América
9 de Junio de 2003.
 Después
del despegue de la sonda europea Mars Express, le toca a la NASA mirar
hacia Marte. Sus dos sofisticados robots móviles, MER-1 y 2, están a
punto para el lanzamiento. El primero en la línea de salida, el MER-2,
ha visto retrasada su partida al menos 24 horas debido a la mala
meteorología. Mientras tanto, la agencia americana ha dado a conocer el
resultado del concurso organizado para bautizar a los dos vehículos. Después
del despegue de la sonda europea Mars Express, le toca a la NASA mirar
hacia Marte. Sus dos sofisticados robots móviles, MER-1 y 2, están a
punto para el lanzamiento. El primero en la línea de salida, el MER-2,
ha visto retrasada su partida al menos 24 horas debido a la mala
meteorología. Mientras tanto, la agencia americana ha dado a conocer el
resultado del concurso organizado para bautizar a los dos vehículos.
Sus nombres van a ser “Spirit” y “Opportunity”. Una estudiante de 9 años
de Arizona, llamada Sofi Collis, escribió el ensayo ganador del
concurso. Fue seleccionada entre 10.000 participantes. De origen
siberiano y adoptada por sus padres estadounidenses a los dos años de
edad, quiere, por supuesto, convertirse en astronauta algún día.
Mientras se celebraba la ceremonia de la presentación de su ensayo, a
unos kilómetros de distancia, en Cabo Cañaveral, el robot “Spirit”
esperaba el momento de su lanzamiento. Sin embargo, la llegada de un
frente tormentoso obligó a los técnicos a posponer su despegue. Su
gemelo, “Opportunity”, está siendo preparado para seguir su camino el
próximo 25 de junio.
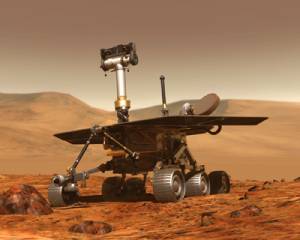
El programa Mars Exploration Rover es una de las empresas más ambiciosas
de la NASA en su escalada hacia el planeta Marte. Después del éxito del
robot móvil Sojourner, hace varios años, los ingenieros de la agencia
han planeado un vehículo mucho mayor y dotado con las herramientas de un
auténtico geólogo marciano. En esta ocasión, además, serán dos los
robots que volarán hacia el planeta, en dirección hacia lugares
distintos de su superficie.
Ambos son idénticos. Podrán obtener imágenes más claras, recorrer muchos
más metros y explorar y examinar las rocas del entorno marciano con
mayor libertad que su antecesor.
Huyendo de la solución técnica del aterrizaje propulsado, que significó
el fracaso de la Mars Polar Lander, los MER volverán a utilizar el
sistema de airbags que tan buenos resultados dio durante la misión de la
Mars Pathfinder. El primero llegará a Marte el 4 de enero de 2004
(cráter Gusev), y el segundo el 25 del mismo mes (Meridiani Planum).
Ambos tratarán de operar durante al menos tres meses, buscando señales
de la presencia, actual o pretérita, de agua en la superficie. Las
pistas para ello están en las rocas, y por eso sus instrumentos estarán
preparados para examinarlas muy de cerca.
Los rovers viajarán almacenados dentro de un escudo térmico apropiado,
de 2,65 metros de diámetro por 1,6 metros de alto. Cada vehículo pesa
1.062 kg al lanzamiento, de los cuales 174 kg pertenecen al robot
propiamente dicho. Éste mide 1,5 metros de altura, 2,3 metros de ancho y
1,6 metros de largo. Está equipado con seis ruedas articuladas, con
motores alimentados por la energía suministrada por un panel solar y una
batería de litio (140 vatios). Los instrumentos son: cámaras
panorámicas, un espectrómetros de emisión térmica en miniatura, un
espectrómetro Mössbauer, un espectrómetro de partículas alfa de rayos-X,
una cámara microscópica, una herramienta para la abrasión de rocas y
varios imanes.
La misión MER-A transportará el robot MER-2 (Spirit, el primero en estar
listo durante las preparaciones). Empleará un cohete Delta-7925-9.5. La
misión MER-B, con el robot MER-1 (Opportunity), utilizará un cohete
Delta-7925H, con aceleradores sólidos algo más potentes.
El programa, que ha costado en total unos 800 millones de dólares, es un
paso adelante en la sofisticación de nuestros exploradores automáticos.
Los rovers pueden detectar el peligro que aparezca frente a ellos en
forma de obstáculos, y maniobrar alrededor de ellos si es necesario. Una
vez seleccionada una roca, extenderá su brazo robótico con los
instrumentos en su extremo. Una cámara mostrará su textura, los
espectrómetros identificarán su composición, y un sistema de abrasión
permitirá examinar el interior “fresco” de la roca. Un grupo de imanes,
mientras, se ocupará de capturar las partículas magnéticas existentes en
la atmósfera del planeta para proceder con su análisis.
Una vez colocados en ruta hacia Marte, los vehículos se separarán de la
etapa superior de sus cohetes para una actuación independiente. Su
estructura estará dividida en varios segmentos. En primer lugar, la
etapa de crucero, que proporciona los recursos técnicos necesarios sólo
para el viaje de ida hacia el planeta. Con forma de disco plano (2,6
metros de diámetro y 1,6 metros de alto), posee paneles solares, antenas
y un sencillo sistema de propulsión para las maniobras de ajuste, así
como un sistema de guiado y orientación. Unido a la etapa de crucero
está el vehículo de descenso. Está compuesto por la carcasa superior y
el escudo térmico inferior. El espacio interno que forman está ocupado
por el robot MER (dentro del vehículo de aterrizaje), así como por el
paracaídas, que se abrirá con un diámetro de 15 metros. El vehículo de
descenso reducirá su velocidad de llegada mediante el rozamiento con la
atmósfera. Alcanzado el punto adecuado, abrirá el paracaídas y encenderá
unos motores sólidos para ayudar en la frenada. El escudo térmico será
expulsado y finalmente se liberará el vehículo de aterrizaje, alrededor
del cual se hincharán una serie de airbags para amortiguar el impacto.
Ya en el suelo, expulsarán el aire para permitir la salida del robot
MER. En caso de que el vehículo de aterrizaje haya quedado en posición
invertida, la secuencia permitirá su colocación en la postura adecuada.
Será el momento de iniciar la misión.
Más información en:
|

