|

 Home / Ultimas Noticias
Home / Ultimas Noticias
Archivo Noticias de la Ciencia y la
Tecnología.
Archivo Noticias del Espacio
Contacto
Suscripciones (público/email)
Boletín Noticias de la Ciencia y la
Tecnología
Boletín Noticias del Espacio
Boletín Noticias de la Ciencia y la
Tecnología Plus
Suscripciones (servicios a
medios)
Reproducción de contenidos en medios
comerciales
|
Recuerda:
suscríbete a nuestros boletines gratuitos y recibe cómoda y
semanalmente las noticias en tu dirección electrónica.
Robótica
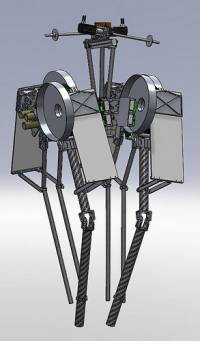
Hacia los Robots Capaces de Andar y Correr
Gastando Menos Energía
28 de Junio
de 2010.
 Un
equipo de investigadores del Laboratorio de Dinámica de la Robótica en
la Universidad Estatal de Oregón ha logrado un importante avance básico
en la robótica, el cual debería llevar hacia robots que no sólo puedan
caminar y correr eficazmente sino que además utilicen poca energía en el
proceso. Un
equipo de investigadores del Laboratorio de Dinámica de la Robótica en
la Universidad Estatal de Oregón ha logrado un importante avance básico
en la robótica, el cual debería llevar hacia robots que no sólo puedan
caminar y correr eficazmente sino que además utilicen poca energía en el
proceso.

Al lograr un enfoque óptimo de diseño para los mecanismos fundamentales
de la robótica, este estudio es uno más de los que están consiguiendo
acercar a la realidad cotidiana los robots capaces de asumir con
suficiente eficiencia misiones complejas, y la creación de miembros
protésicos que sean controlados mucho mejor por sus usuarios o que
incluso ayuden a algunas personas que usan sillas de ruedas a adquirir
una cierta capacidad de “caminar”.
“Los investigadores han trabajado durante mucho tiempo en la locomoción
de los robots basándose fundamentalmente en la experiencia y la
intuición”, explica Jonathan Hurst, profesor de robótica y diseño
mecánico en la Universidad Estatal de Oregón. “Lo que nosotros hemos
hecho es dar un paso atrás para analizar la dinámica fundamental del
sistema mecánico y determinar qué comportamiento es realmente posible
para un sistema robótico dado. Una piedra no puede volar, no importa qué
software se escriba para ella".
El planteamiento de este equipo de investigación conduce a una base
científica a partir de la cual se puede dilucidar qué elementos
funcionarán con la debida eficacia y cuáles no, antes incluso de
comenzar a fabricarlos.
Actualmente, la mayoría de las aplicaciones de la robótica están
materializadas en máquinas que trabajan en una situación muy específica
y controlada, recogiendo las piezas de una cadena de montaje, soldando
en un punto concreto de un automóvil, siempre del mismo modo exacto
miles de veces al día.
Pero en lo que se refiere a la locomoción, los humanos y otros animales
somos difíciles de emular. Usando una cantidad de energía discreta,
podemos movernos con pasmosa versatilidad sobre un terreno accidentado,
y responder a éste con un sofisticadísimo equilibrio que exige un
control muy preciso de músculos y tendones. Tenemos diferentes maneras
de manejar nuestras fuerzas, desde el modo de actuar para mantener en un
sitio fijo un objeto hasta la manera de lograr que no se vierta el
contenido de una taza de café sostenida entre las manos durante el
trayecto de un automóvil por una carretera con baches.
En los nuevos resultados de su labor de investigación, los robotistas de
la Universidad Estatal de Oregón han demostrado esencialmente que esas
dos habilidades son mutuamente excluyentes. Los humanos resolvemos el
dilema recurriendo a flexionar pares de músculos opuestos. De ese modo,
cambiamos las propiedades dinámicas de los brazos. Para un robot, la
situación actual es que cuanto mejor sea en una de esas dos habilidades
generales, peor lo será en la otra.
Los robots hoy existentes que pueden caminar y correr tienden a estar
tan rígidos como sea posible mientras logran un modo básico de andar.
Pero este método usa una gran cantidad de energía, reduciendo
significativamente su valor útil y sus posibles aplicaciones en el mundo
cotidiano.
Los investigadores de la Universidad Estatal de Oregón están trabajando
hacia una filosofía de diseño que produzca en los robots un
comportamiento locomotor similar o mejor al actual, pero que use mucha
menos energía. Ese ahorro energético ya bastaría por sí solo para hacer
comercialmente viables muchas aplicaciones robóticas. La meta final es
reunir lo mejor de ambos mundos, el biológico y el cibernético,
acercando las capacidades robóticas a las habilidades de los seres
vivos.
Información adicional en:
|
|

