|
 Home / Ultimas Noticias
Home / Ultimas Noticias
Archivo Noticias de la Ciencia y la
Tecnología.
Archivo Noticias del Espacio
Contacto
Suscripciones (público/email)
Boletín Noticias de la Ciencia y la
Tecnología
Boletín Noticias del Espacio
Boletín Noticias de la Ciencia y la
Tecnología Plus
Suscripciones (servicios a
medios)
Reproducción de contenidos en medios
comerciales
|
Recuerda:
suscríbete a nuestros boletines gratuitos y recibe cómoda y
semanalmente las noticias en tu dirección electrónica.
Ingeniería
Un GPS Para Robots Autónomos
17 de Agosto de 2009.
 Investigadores
de la Universidad Carlos III de Madrid (UC3M) han desarrollado un
algoritmo para robots y otros sistemas autónomos que permite calcular
trayectorias, evitar paredes y obstáculos para encontrar un camino,
suave y seguro, de forma similar a cómo hacen los humanos. Investigadores
de la Universidad Carlos III de Madrid (UC3M) han desarrollado un
algoritmo para robots y otros sistemas autónomos que permite calcular
trayectorias, evitar paredes y obstáculos para encontrar un camino,
suave y seguro, de forma similar a cómo hacen los humanos.

En los días de calor se produce un espejismo en las carreteras cuando
están calientes, en las que debido a que las capas de aire próximas al
asfalto están más calientes que el aire, los rayos del sol se curvan y
parece se reflejan en la carretera. “Este hecho y el principio de Fermat
(‘La luz siempre viaja por el camino más rápido’) aplicado a medios con
índice de refracción variable, como ocurre en el caso del espejismo, nos
llevaron a la idea de que si poníamos en los mapas que usan los robots,
un índice de refracción grande cerca de las paredes y los obstáculos y
más pequeño en las zonas libres, sólo teníamos que calcular el camino
que seguiría la luz”, explica uno de los investigadores, Santiago
Garrido, del Departamento de Ingeniería de Sistemas y Automática de la
UC3M.
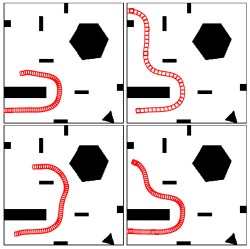
El problema que han resuelto estos científicos es el de Robot Path
Planning o Robot Motion, que consiste en hallar la trayectoria que debe
seguir un robot, evitando las paredes y los obstáculos que pueda haber,
de forma que la trayectoria elegida sea suave, segura y corta, lo más
parecida posible a la humana. La suavidad de los caminos corresponde
aproximadamente a lo que en matemáticas es al menos con dos derivadas,
es decir, que el robot no tenga que cambiar bruscamente de dirección, lo
cual es complicado especialmente si lleva una cierta velocidad o si no
es muy maniobrable. El método que presentan los investigadores, llamado
FM², está basado en la expansión de una onda en un medio con índice de
refracción variable y es capaz de encontrar el camino siempre que exista
y con rapidez a la hora de recalcular las trayectorias en un tiempo
mínimo.
En la actualidad los científicos de la UC3M están probando estos
algoritmos con los robots del Robotics Lab de la Universidad y con los
del proyecto ROBAUCO que reúne a cuatro centros tecnológicos (Tecniker,
Fatronik, Cartif e ITI) y cuatro universidades (UC3M, UPC, UPV y US).
Los robots van equipados con varios sensores, especialmente dispositivos
láser que miden las distancias a los objetos y paredes hasta un alcance
de 30 ó 40 metros. “Con estos datos que van recogiendo se va
construyendo un mapa al que se pueden añadir los datos previos que se
conozcan y sobre este mapa se calcula el camino que debe seguir el robot
para llegar al destino”, explica el profesor Garrido.
Éste método matemático general puede tener numerosas aplicaciones en
muchos campos de la ciencia, sobre todo en aquellos que pueden ser
formulados como problema de tiempo mínimo en un campo de índice de
velocidad variable. “Hasta ahora, lo hemos aplicado a la búsqueda de
trayectorias para robots y actualmente lo estamos aplicando a Control
Óptimo con excelentes resultados -comentan los investigadores-. Estamos
en las fases previas y sólo hemos presentado los resultados previos en
un congreso -añaden- pero es una línea muy prometedora y muy
interesante”. (UC3M)
Información adicional en:
|

