|
 Home / Ultimas Noticias
Home / Ultimas Noticias
Archivo Noticias de la Ciencia y la
Tecnología.
Archivo Noticias del Espacio
Contacto
Suscripciones (público/email)
Boletín Noticias de la Ciencia y la
Tecnología
Boletín Noticias del Espacio
Boletín Noticias de la Ciencia y la
Tecnología Plus
Suscripciones (servicios a
medios)
Reproducción de contenidos en medios
comerciales
|
Recuerda:
suscríbete a nuestros boletines gratuitos y recibe cómoda y
semanalmente las noticias en tu dirección electrónica.
Robótica
Inspector Robótico
13 de
Agosto de 2004.
 Ingenieros
de la Carnegie Mellon University, colaborando con la Northeast Gas
Association, el National Energy Technology Laboratory y otros centros,
han desarrollado el prototipo de un robot que es capaz de arrastrarse a
través de los conductos subterráneos del gas. Guiado por control remoto,
ha sido pensado para inspeccionar dichos conductos y detectar anomalías
que precisen ser atendidas por los especialistas humanos. Ingenieros
de la Carnegie Mellon University, colaborando con la Northeast Gas
Association, el National Energy Technology Laboratory y otros centros,
han desarrollado el prototipo de un robot que es capaz de arrastrarse a
través de los conductos subterráneos del gas. Guiado por control remoto,
ha sido pensado para inspeccionar dichos conductos y detectar anomalías
que precisen ser atendidas por los especialistas humanos.
El robot ya ha sido probado en Yonkers (Nueva York), donde ha
inspeccionado con éxito decenas de metros de tuberías de hierro de 8
pulgadas, aún en activo, instaladas originalmente en 1890.
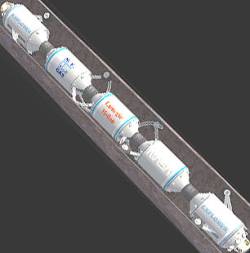
El robot, llamado Explorer, está segmentado como una sucesión de
salchichas, y está equipado con cámaras de ojo de pez, tanto delante
como detrás, así como luces. Sus sistemas le permiten interactuar con un
operador remoto a través de comunicaciones inalámbricas, mientras se
halla dentro del conducto. A través de este enlace puede enviar imágenes
en tiempo real del interior del tubo, así como otros datos. El operador
sigue el proceso desde un vehículo aparcado en la calle.
Explorer puede viajar grandes distancias desde su punto de entrada. Su
desplazamiento total viene determinado por el alcance de las
comunicaciones y la energía almacenada en sus baterías.
Desarrollado por el equipo de Hagen Schempf, el robot podría cambiar
considerablemente el aspecto de las tareas de mantenimiento de
estructuras en el sector. Sin embargo, es sólo la punta del iceberg
respecto a lo que se puede hacer en cuanto a dispositivos de inspección
de áreas tradicionalmente inaccesibles para los seres humanos.
El sistema Explorer ha estado en desarrollo durante más de tres años y
ha sido probado en el laboratorio en muy diversas circunstancias. Es
capaz de girar en codos de 90 grados y ya ha demostrado su utilidad en
comparación con los métodos tradicionales que emplean cámaras empujadas
por cables.
Las habilidades del robot estarán sujetas a lo que pueda aportar la
próxima generación de sensores. Se espera que pueda llegar a obtener
imágenes en alta resolución para detectar daños minúsculos.
El sistema ha sido diseñado para conductos de distribución principales
de 6 y 8 pulgadas, habituales en zonas urbanas. Métodos anteriores
requerían excavar cada 30 o 60 metros. El Explorer, en cambio, sólo
necesita un punto de entrada para después explorar decenas y hasta
cientos de metros en cada misión.
Información adicional en:
|

