|
 Home / Ultimas Noticias
Home / Ultimas Noticias
Archivo Noticias de la Ciencia y la
Tecnología.
Archivo Noticias del Espacio
Contacto
Suscripciones (público/email)
Boletín Noticias de la Ciencia y la
Tecnología
Boletín Noticias del Espacio
Boletín Noticias de la Ciencia y la
Tecnología Plus
Suscripciones (servicios a
medios)
Reproducción de contenidos en medios
comerciales
|
Recuerda:
suscríbete a nuestros boletines gratuitos y recibe cómoda y
semanalmente las noticias en tu dirección electrónica. Ingeniería.
Tecnología Oceánica A Prueba
9 de Diciembre de 2002.
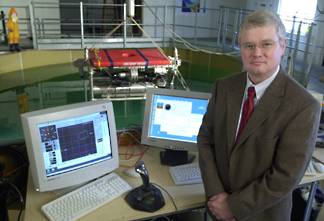 Gracias a un enorme tanque de agua, los ingenieros de la Johns Hopkins University están desarrollando y probando los sistemas de control por ordenador que servirán como "cerebro" de algunos de los vehículos de exploración robótica más avanzados del mundo. Gracias a un enorme tanque de agua, los ingenieros de la Johns Hopkins University están desarrollando y probando los sistemas de control por ordenador que servirán como "cerebro" de algunos de los vehículos de exploración robótica más avanzados del mundo.
El tanque para estudios hidrodinámicos, circular, se encuentra en el interior del laboratorio de Maryland Hall. En estos momentos, los investigadores están ensayando en él el Remotely Operated Vehicle, un pequeño robot desarrollado en la universidad. Sus sistemas de control han sido recientemente adaptados al vehículo Jason II, mucho mayor y más capaz, y han sido también utilizados en el Alvin, el sumergible tripulado de la Woods Hole Oceanographic Institution.
Los ingenieros están constantemente mejorando sus programas de navegación. Según el director del centro, Louis Whitcomb, los robots oceánicos como el Jason II son herramientas cada vez más útiles en la investigación científica marina. Carecen de las limitaciones de los hombres equipados, que sólo pueden descender hasta unos 100 metros de profundidad. Las zonas más profundas, y quizá las más interesantes, se encuentran de hecho a unos 11.000 metros bajo la superficie. Para explorarlas son necesarios los sumergibles blindados, que se vienen construyendo desde los años 60. Con ellos se ha examinado el casco del Titanic y otros lugares interesantes.
El problema principal es su limitada autonomía. Deben transportar el aire para sus tripulantes y el combustible para sus maniobras, lo que limita su tiempo de inmersión hasta unas 8 ó 12 horas. Para superar esta barrera, desde hace unos 15 años se han estado construyendo vehículos robóticos, sin tripulación, que funcionan unidos mediante un cable a un buque oceanográfico. A través de estos cables reciben energía e instrucciones sobre lo que deben hacer. Muchos llevan cámaras de video que permiten a los científicos apreciar en tiempo real lo que sus "ojos" contemplan bajo el agua. También suelen utilizar brazos robóticos para recoger artefactos, rocas o muestras biológicas.
Pero la zona profunda del océano es un lugar frío, oscuro, sometido a una altísima presión. Los equipos deben poder operar bajo estas condiciones. Los vehículos autónomos lo consiguen, pero son precisos métodos de control y navegación a grandes distancias. Estos sistemas son los que el equipo de Whitcomb desarrolla y prueba en su tanque. Por ejemplo, para maniobrar, el submarino debe tener un punto de referencia, a pesar de que bajo el agua podría no tenerlo en absoluto. Un ordenador de a bordo integra las señales de una docena de sensores que calculan constantemente la posición y velocidad del vehículo. Con esta información, un operador desde la superficie, mediante una palanca de mando o joystick, puede gobernarlo de forma eficiente. El sistema también permite indicar una determinada posición al vehículo, y su ordenador lo moverá automáticamente hacia ella.
Información adicional en:
|

