|
 Home / Ultimas Noticias
Home / Ultimas Noticias
Archivo Noticias de la Ciencia y la
Tecnología.
Archivo Noticias del Espacio
Contacto
Suscripciones (público/email)
Boletín Noticias de la Ciencia y la
Tecnología
Boletín Noticias del Espacio
Boletín Noticias de la Ciencia y la
Tecnología Plus
Suscripciones (servicios a
medios)
Reproducción de contenidos en medios
comerciales
|
Recuerda:
suscríbete a nuestros boletines gratuitos y recibe cómoda y
semanalmente las noticias en tu dirección electrónica.
Robótica
Un Robot Que Se Adapta Por Sí Solo
a la Pérdida de Uno de Sus Miembros
5 de
Enero de 2007.
 Muchos
robots se programan con un "modelo" bastante rígido de cómo son ellos
mismos y el mundo a su alrededor. Si un robot se daña o su entorno
cambia inesperadamente, no puede adaptarse. Así que unos investigadores
han construido un robot que funciona con su propio modelo de sí mismo,
que puede revisar para adaptarse a una "lesión". Primero aprende por sí
mismo a caminar. Y luego, cuando está dañado, aprende a cojear. Muchos
robots se programan con un "modelo" bastante rígido de cómo son ellos
mismos y el mundo a su alrededor. Si un robot se daña o su entorno
cambia inesperadamente, no puede adaptarse. Así que unos investigadores
han construido un robot que funciona con su propio modelo de sí mismo,
que puede revisar para adaptarse a una "lesión". Primero aprende por sí
mismo a caminar. Y luego, cuando está dañado, aprende a cojear.
Aunque el robot de prueba es un dispositivo simple de cuatro patas, los
investigadores aseguran que el algoritmo subyacente podría usarse para
construir robots más complejos, capaces de enfrentarse a situaciones
inciertas, como la exploración espacial, y también para profundizar en
el conocimiento del sistema locomotor de humanos y animales.
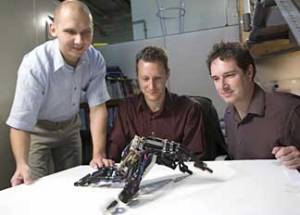
La investigación se llevó a cabo en el Laboratorio de Síntesis
Computacional de la Universidad de Cornell, bajo la dirección de Hod
Lipson, profesor de ingeniería mecánica y aerospacial, junto con Josh
Bongard, un antiguo investigador de la misma universidad, que está ahora
en la de Vermont, y Viktor Zykov.
En lugar de darle un juego rígido de instrucciones al robot, los
investigadores le permitieron descubrir su propia naturaleza y aprender
a autocontrolarse, un proceso que puede parecerse a la forma en la que
los bebés humanos y crías de animales descubren sus cuerpos y
experimentan con ellos. Su habilidad para desarrollar este automodelo es
lo que lo hace capaz de adaptarse a una lesión.
El robot, que se parece a una estrella de mar de cuatro patas, comienza
sabiendo sólo cuáles son sus partes, pero no cómo están colocadas o cómo
usarlas para cumplir su principal orden: moverse hacia adelante. Para
averiguarlo, aplica lo que puede considerarse el método científico: la
teoría seguida por la experimentación, continuada a su vez por una
teoría más refinada.
Empieza construyendo una serie de modelos informáticos de cómo podrían
estar colocadas sus partes, reuniéndolas primero en arreglos aleatorios.
Entonces desarrolla órdenes que envía a sus motores para probar sus
modelos.
La máquina no tiene un sólo modelo de sí misma, tiene muchos diferentes
modelos candidatos simultáneos, compitiendo entre sí. Los modelos
compiten sobre cuál puede explicar mejor las experiencias pasadas del
robot.
El resultado normalmente es un andar torpe pero funcional; el más eficaz
hasta ahora es una especie de movimiento de oruga en el que el robot
mueve hacia delante sus patas y su cuerpo alternadamente.
Una vez que el robot alcanza este punto, los experimentadores le quitan
parte de una pierna. Cuando no puede avanzar, de nuevo genera y prueba
16 simulaciones para desarrollar una nueva forma de andar.
Información adicional en:
|

